Recommended videos
Recommended videos

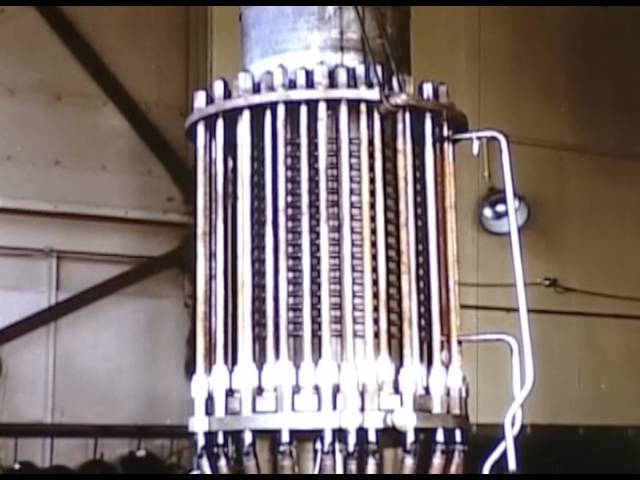
The Molten-Salt Reactor Experiment
1,015,530 views

Neil deGrasse Tyson Explains The Three-Body Problem
3,597,761 views
Report on SCARAB, a submersible craft for underwater cable maintenance, from Bell Labs, 1982
6,484 views

AT&T Tech Channel
103K subscribers
Tue, 26 May 2015 00:00:00 GMT

Tags
3 Comments